那么工程部分则涉及到,比如说视觉这件事情,就涉及到你如何去组视觉的服务器,你如何选镜头,你如何搭建后面的算法,你在算法实现成代码的时候,你如何取组织代码,包括传感器你如何去选材料,如何去制作,这就是工程的部分。
运动规划:怎么从A点到达B点
在sense-plan-act大图里面的第二块,也是最主要的一块,是Motion Planning,或者叫运动规划,就是解决如何从A点移动到B点,不碰到周围的障碍物的问题。这是我们刚才视频里面有展示的图,就是机器人做运动规划的一个图。
大家可以仔细看有一个虚幻的机械臂的动作,就是它在计算运动规划的过程,可是这个臂的运动太快了,它一直在追那个规划,追自己的幻影。

运动规划讲起来是一个比较大的复杂的话题,简单说明一下。
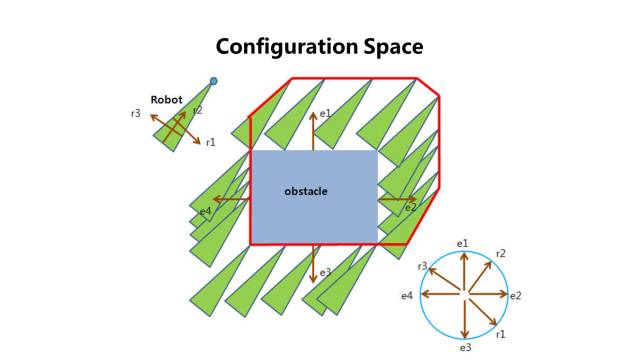
假如这个画面上绿色的三角形是一个机器人,右上角的圆点是机器人的参照坐标,中间那个大的蓝色部分是一个方形的障碍物。对于这个机器人来说,实际上是有三个不同的参数可以用来描述它的完整状态――X、Y的坐标,以及它的旋转方向。
在这个情况下,我假设它的旋转方向是不变的,也就是XY两个参数就可以描述这个机器人的一个完整的状态。
假如说我以坐标蓝点作为一个参照点的话,这个机器人能够到达,或者说它的参考坐标点能够到达的那个区域就是红线以外的区域。这是一个很重要的概念,后面所有的东西都是以这个基础的。
再假设,这个三角形的机器人本身发生了形变。左边是机器人的工作空间,右边是它的配置空间(configuration space)。在工作空间里,机器人完整的形体由蓝色三角形来描述;在配置空间里面,机器人的状态由一个小绿点来描述。当机器人本身的形状变化的时候,虽然障碍物没变,但是机器人在配置空间里能够达到的位置是一直在变化的。
刚才谈论的是一个二维的情况,这是一个三维的情况。大家可以看到右边的平面里面的小三角形机器人,如果它拥有旋转的能力,它的状态空间就会形成这样的三维的形状,看起来就会非常非常的复杂。
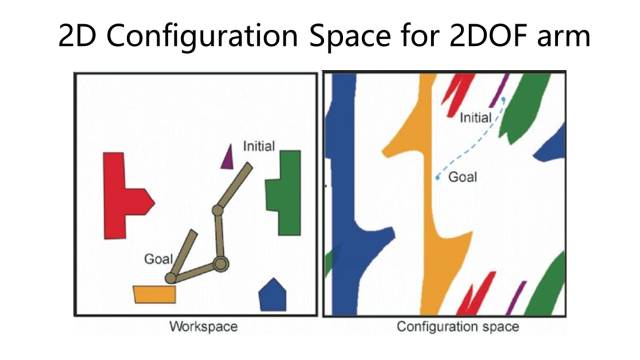
左边是一个在二维空间里面的机械臂,右边是它对应的configuration space。
这个是在motion panning里面最经典的两个算法,左边这个叫Dijkstra,右边这个叫A*。A*的算法是给一个机器人寻找最优路径的一个算法,它可以更快的去搜索到最后的结果,白色的部分就是机器人已经经过的搜索过的空间,很明显A*比Dijkstra要快很多。
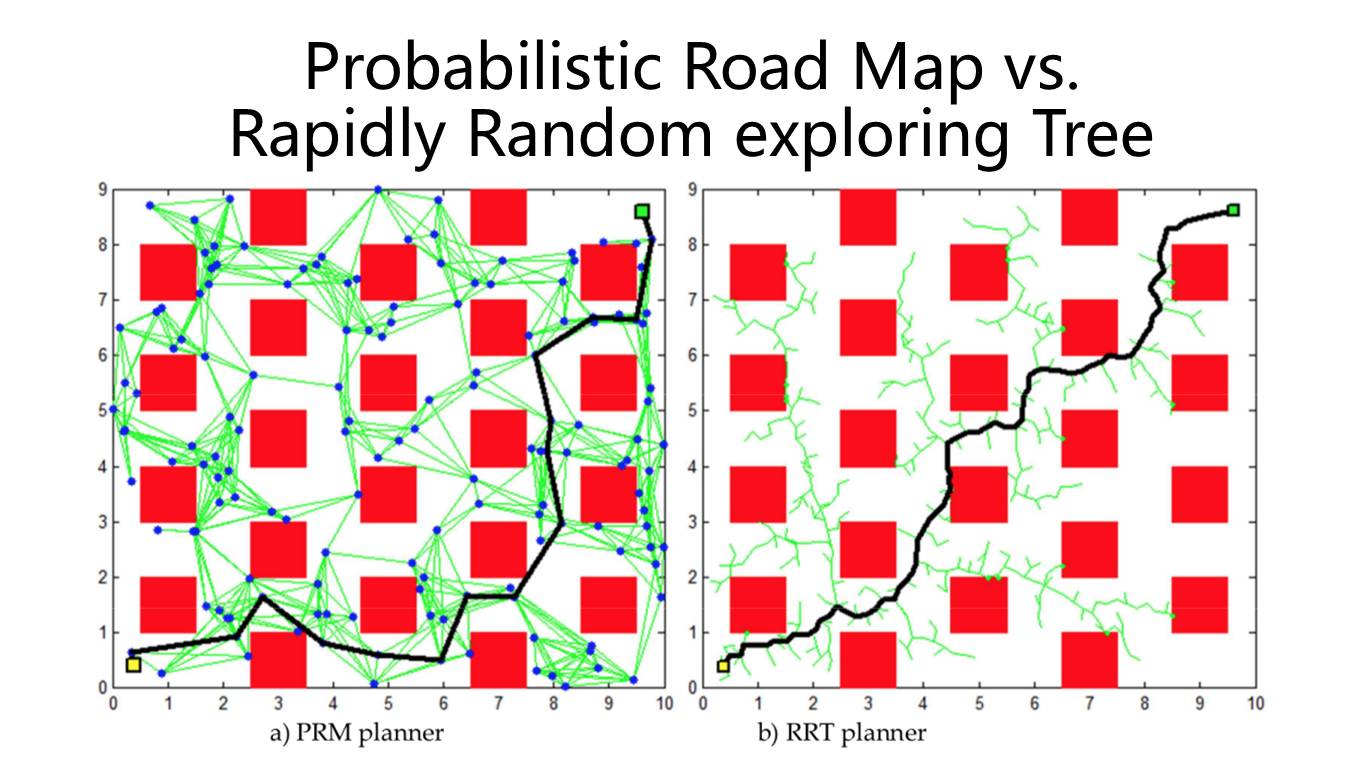
这是motion panning里面其他的比较流行的算法。左边是PRM(Problistic Road Map),红色的是障碍物,绿色的是提前算好一些的连接,黑色是最后算出来那条轨迹。
右边这个叫做Rapid Random Exploring Tree,这是现在最常用的,也是最实用的算法――怎么在空间里面从起点到终点拉一条线。
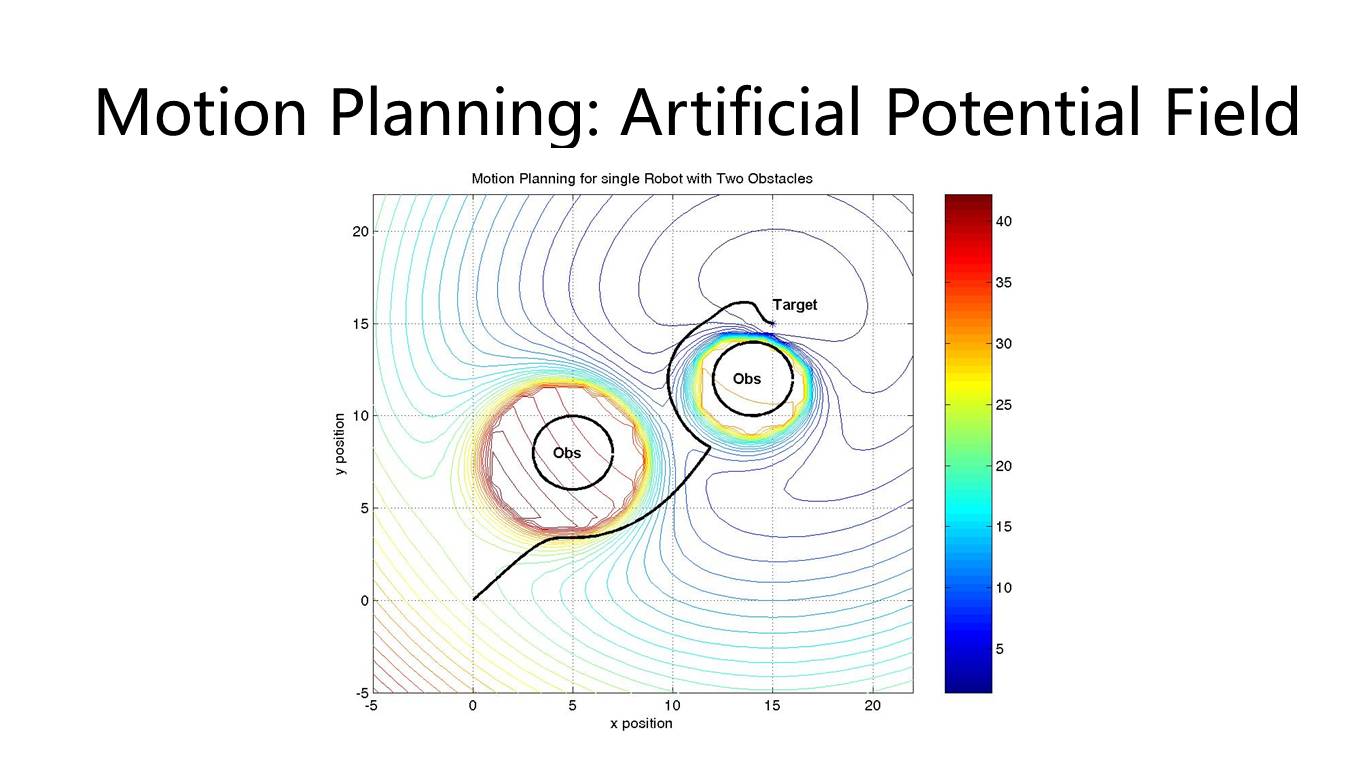
这个也是比较常用的一个算法,叫做人工势长法。
上面讲的是二维的状态空间、三维的状态空间,其实真正的机器人的状态空间自由度非常高,维度也非常高。

这个图左边是我们的机器人,我们叫Dorabot Picker,它有10个自由度,底盘有前后移动、左右移动,旋转和升降共4个自由度,机械臂有6个自由度,加起来就是10个自由度。如果再算上手指的6个自由度,那总共就是16个自由度。
右边是NASA的机器人叫做Valkyrie,NASA的humanoid机器人是类人机器人,这个机器人全身上下能动的关节一共32个,也就是说不管是左边的机器人还是右边的机器人,如果要运动的话都必须要在非常高维的空间里做好规划才能实现。
抓取规划:怎么抓取物件?
而grasp planning则是解决机器人怎么去抓取一个物体的问题。
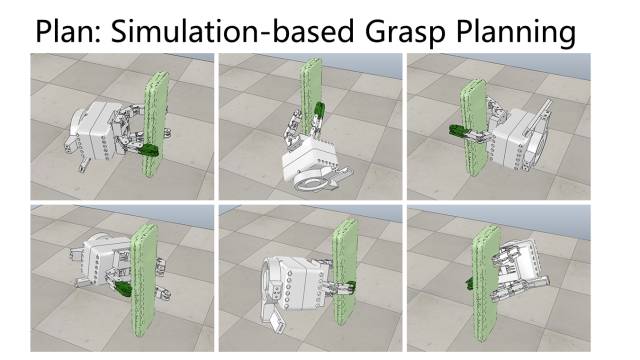
这个是基于simulator的,基于模拟器的一个grasp plan。
这是我们在视频里面展示的,基于高度信息的grasp plan。
所有的这些形式科学的部分,特别是数学基础都是科学的部分,而如何真正做出这些机器人,就是对应的工程的部分。
执行:让机器人执行规划
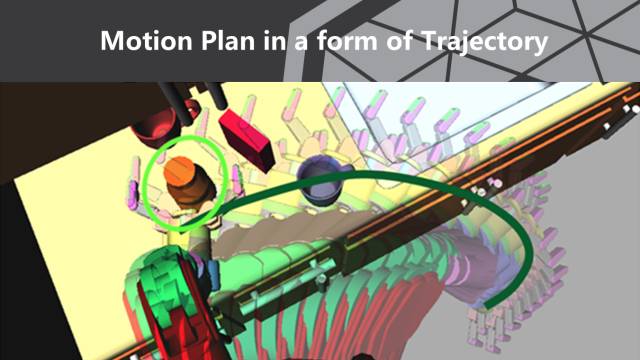
下图是一个机器人执行规划时的一个示意图。
这个是最经典的控制机械臂运动或者任何的执行器运动的经典的算法叫做PID。
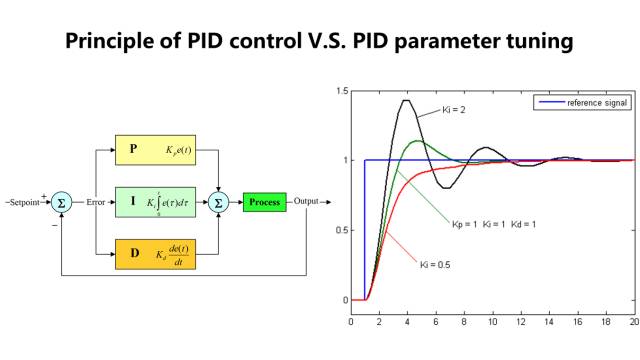
左边是它的原理图,右边是真正去调节PID三个参数的时候系统的响应。
下面给大家看一系列的制品,这些都是日本东京大学做机器人执行做得很好的一个实验室做出来的。

不管是把手机扔到空中重新接到
两台机器人一台扔球一台挥棒
还是机械手在空中可以用镊子夹住飞上来的一粒米。
转载请注明出处。
 相关文章
相关文章 精彩导读
精彩导读 热门资讯
热门资讯 关注我们
关注我们
