如何造一个像哆啦A梦一样的机器人?(3)
2017-03-26 编辑:
所有的效果实现都需要在科学上解决,比如说传感器本身是怎么工作的,电机是怎么工作的,如果做模式识别,在理论上如何解决模式识别这样的问题,在实现的时候你要选造机械手你要选择传感器的材料。
如果大家看完还觉得机器人的科学性不够强的话,可以看一下这个。
这是斯坦福大学一个叫BDML实验室做的,基于壁虎爬墙利用的范德瓦尔斯力,在机器掌心做了个非常非常小的执行器,可以让壁虎形的机器人能够实现爬墙的效果。
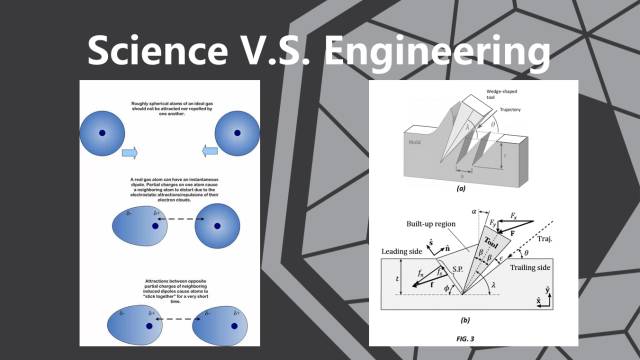
左边就是范德瓦尔斯力的一个原理,右边就是他们如何真正地在工程上实现,就是做出一个人工的材料,让这个材料附在任何物体表面的时候,都能使用范德瓦尔斯力来和表面产生一个支撑力。

最后的最后,再分享一个有趣的东西,还是刚才那个东京大学做的――通过高速的相机,高速的执行,高速手的tracking、跟踪,可以实现百分之百胜利的猜拳机器人。